Projekt 2 der ATACAMA EXPEDITION 2017
Unsere Expedition in den grossen Höhen die wir mit unseren Fahrzeugen befahren können bietet uns die einmalige Gelegenheit die Besonderheiten des Reisens in diesen Höhen genauer zu studieren.
In Projekt 2 wird die Technik untersucht : Wie verhält sich eine Dji Mavic Pro Drohne in Normalzustand in grossen Höhen, wie hoch, wie lange und bei welcher Höhe und Temperatur kann sie noch fliegen, vom Hersteller mit max. 5'000 müM angegeben sind wir natürlich gespannt was sie effektiv leisten kann.
Fliegt sie höher als 5'000müM, wieviel höher bei welcher RPM, was ist da die max. Flugzeit ..............
Die genaue Auswertung unserer Aufzeichnungen wird dann nach der Reise unter Science vorgestellt
Performance Auswertung der Dji Mavic Pro 2017
Wir haben die Gelegenheit genutzt um das Verhalten unserer Drohne > Quadrocopter zu testen und systematisch zu protokollieren.
Bei rund der Hälfte der 30 Drohnenflüge wurde die Performance der Dji Mavic Pro Drohne ( Jg. 2017) aufgenommen und ausgewertet. Das Fluggerät wurde in Kombination mit einem Apple iPad mit GPS oder meistens mit einem Mobile Samsung A5 2017 geflogen.
1 Was man wissen muss:
Wir hatten 4 Akkus zur Verfügung und hätten somit 4 Flüge pro Tag ausführen können. Das Problem ist aber dass die Batterie der Fernbedienung nur etwa 3.5 Flüge zulässt bis sie erschöpft ist und geladen werden will. Die Ladung der Fernbedienung oder der Akkus erfolgte vielfach mit dem Autoadapter über die Autobatterie was immer länger dauerte als am Festnetz.
Eine Gesamtflugdauer von 27 min oder die gemäss Datenblatt durchschnittliche Flugzeit von 21 min bei 15% Akkurestladung erreichten wir nur Zuhause, aber nicht in dieser Höhe. Nach 11-13 min Flugzeit will die Drohne back to Home. Man kann das mit -Return Home abbrechen- noch ein paar Minuten hinauszögern, muss dann aber schauen dass sie heil zum Ausgangspunkt zurückkommt. Wir hatten fast immer Probleme mit starken magnetischen Störstrahlungen oder elektrischen Interferenzen die das Kompass-Signal störten, darum konnten wir unterwegs nie eine Kompass Kalibrierung durchführen.
Beim Einschalten wurde von der App immer ein Software-Update verlangt. Das haben wir aber bewusst nie gemacht da wir nicht wussten was ein Update beinhaltet. Die Internetverbindungen in bewohnten Gebieten waren auch viel zu langsam um so etwas zu probieren. Meistens waren wir jedoch in Mobilsignalfreier Zone unterwegs. Die DijGo 4 App hat das aber gar nicht gerne und es dauerte immer minutenlang bis wir die App dazu brachten nicht nach einem Signal zu suchen um endlich Startbereit zu sein. Das GPS Signal hat das Samsung A5 aber immer gefunden.
Die Aufnahmen die wir gemacht haben wurden auf einer Höhe von 2'500m bis in 6'500m Höhe ausgeführt. Wir haben mit verschiedenen Filtern experimentiert, in grosser Höhe und den gleissend hellen Salaren und Wüsten haben wir die ND4 bis ND16 Filter eingesetzt, über dem Wasser aber auch mal einen CLP Polfiter.
Die sehr helle Umgebung verhinderte manchmal auch das Lesen des Handybildschirms. Der Pilot musste sich in eine dunkle Decke einhüllen um die Daten des Bildschirm zu erkennen damit er die Drohne fliegen konnte.
Durch die Sichtproblematik wurden bei den Einstellungen auch mal Fehler gemacht, so wurde die Focusautomatik des Gimbals aus Versehen auf Manuell gestellt, ein Teil der Fotos und Videos aus jener Serie sind dadurch unscharf und können leider nicht wiederholt werden.
Die Mavic Pro fliegt höher als 6'525 müM !!!
Der Gesamteindruck ist phänomenal, hier auf dem Volcan Uturunco auf 6'022 müM, Mavic Pro fliegt links oben...
2 Die Flug-Performance hat unsere Erwartungen klar übertroffen.
- Bei 6500m war die maximale Flughöhe noch lange nicht erreicht worden.
- Die Stabilität war auch bei grossen Windstärken und Böen immer noch gewährleistet, teilweise mit Schräglage
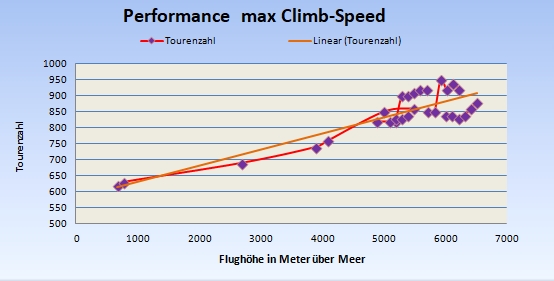
- Die maximale Tourenzahl muss bei rund 950 Touren/ Min liegen, welche nur im maximalen Steigflug über 6000m Flughöhe erreicht wurde.
- Die Tourenschwankungen von 20-50 Einheiten (bei 500-700 U/min) waren auf die starken und böigen Winde zurückzuführen.
- Leichter Schneefall und Nebel um den Gefrierpunkt hatte eine leichte Erhöhung der durchschnittlichen Tourenzahl auf dieser Höhe zur Folge. Vereisungen an der Drohne (Propeller) wurden keine festgestellt.
- Die Grenze der programmierten maximalen Steiggeschwindigkeit von rund 4m/s ( im Sportmodus 5m/s = 18km/h) wurde erst um 6000m Höhe und mit Windturbulenzen das erste Mal mit 950 U/min erreicht.
- Die jeweils starken Winde (geschätzt max. 15-35 km/h) konnten von der Drohne kompensiert werden, mit jeweils roter Warnanzeige .
- Das Landen der Drohne war problemlos. Im schwierigen Gelände mit Felsen oder Sumpf wurde die Drohne ein paar Mal im Levelflug mit der Hand gefasst und abgestellt.
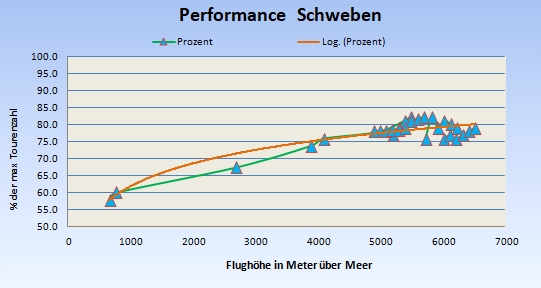
Auch auf 6522 müM konnte mit nur 85 % der maximalen Rotorendrehzahl die Drohne stabil im Schwebezustand gehalten werden.
Die Abweichungen der Drehzahlen auf gleicher Höhe sind auf die dannzumal herrschenden Winde zurückzuführen.
Nebel und leichter Schneefall brachte ebenfalls eine leichte Erhöhung der Tourenzahl beim Schweben.
Flughöhe in müM und Drehzahl, Tourenzahl der Rotoren
Der Steigflug ist limitiert auf ca. 4 m/sek (ca. 14,4 Km/h). Das entsprach ungefähr unserer gemessen Zeitdauer pro 100m Höhen Differenz von ca 25s/100m Höhe. Auf jeder Höhe konnten wir die ca. 4m/s erreichen, die Drehzahl erhöhte sich kontinuierlich mit der Höhe, d.h. die Steiggeschwindigkeit bleibt auch auf grosser Höhe konstant, dafür steigt die Tourenzahl kontinuierlich mit der Höhe an.
Die Drohne erreichte nur einmal unter Einfluss von zusätzlichen Windböen die max. Tourenzahl von geschätzten 950 U/min. Das heisst, über etwa 7'000 m Flughöhe verringert sich die maximale Steiggeschwindigkeit da die Höchstdrehzahl von 950 U/m erreicht ist, wir nehmen an sie steigt dann immer langsamer bis etwa 7'900 müM ohne Windlast. Der Schwebezustand ohne Wind war bei 760 U/m auf der Höhe 6'525 müM.
Die Auswertung der maximalen Vorwärtsgeschwindigkeit von 35 Km/h und die Auswertung der fixen maximalen Absinkgeschwindigkeit von 3m/sec. ( war immer ungefähr 650 U/Min) wurden nicht ausgeführt, da man bei den Flügen nie an die Performance-Limiten gestossen ist.
3 Die Leistungsfähigkeit der Batterien war gut
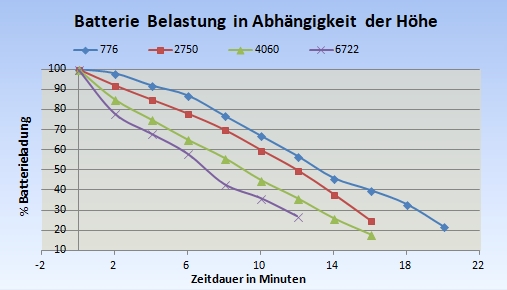
- Die Abnahme der Flugdauer im Zusammenhang mit der Höhe entsprach unseren Erwartungen. Mit halber Luftdichte auf 5000m muss die Drehzahl (Leistung) entsprechend erhöht werden, um den notwendigen Auftrieb bei gleicher Geschwindigkeit erzeugen zu können.
- Den Einfluss der Temperatur auf gleicher Flughöhe konnte nicht evaluiert werden, da zu wenig Vergleichsdaten vorhanden sind.
- Der Alarm für die Rückkehr ist immer zeitgerecht oder eher zu früh ausgelöst worden.
- Nach dem Flug hatte die Batterie meistens um die 10-20% Restkapazität, bei abgebrochener Heimkehr manchmal auch weniger.
- Das Laden der Batterien dauerte im Auto über 4 Stunden
Die Länge der Einsatzdauer nimmt logischerweise mit der Höhe müM ab, da die Tourenzahl (Stromverbrauch) höher ist.
Die nutzbare Flugdauer wird von den gut 21 min = 15 Minuten + 6 min Return auf Meereshöhe auf rund 13 min = 8 Minuten + 5 min Return (60%) auf 6000m Höhe reduziert, da entspricht einer linearen Abnahme von ca. 8% /1000m
Die Reduzierung der Flugdauer auf rund 50 % stimmt ungefähr mit der Abnahme der Luftdichte überein.
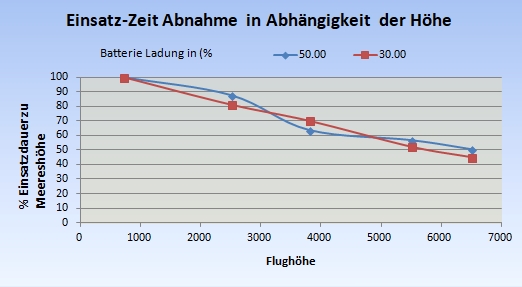
Die Abnahme der Batteriekapazität in Abhängigkeit der Flughöhe auf 50% und auf 30 % der Batterieladung ist ungefähr gleich stark.
Bei 30 % Restkapazität der Batterie wird meistens der Alarm für die Rückkehr ausgelöst
4 Die Foto und Video Performance war beeindruckend:
- Die Gimbal-Kamera Stabilität war auch bei grösseren Windgeschwindigkeiten bis 15 kmh sehr gut.
- Wegen der extremen Sonneneinstrahlung musste die Belichtungseinstellung immer wieder angepasst werden.
- Die Scharfeinstellung musste laufend kontrolliert und nachjustiert werden
- Ein Objekt fixieren (fahrendes Auto) und verfolgen war automatisch nicht möglich, die Fahrzeuge waren meistens zu schnell
- Das Fliegen und die gleichzeitige Kameraführung ist anspruchsvoll. Wegen der grellen Sonneneinstrahlung musste man die Steuerung der Drohne unter einer Decke im Dunkeln vornehmen.
Bericht und Messungen M.Lüthi / Drohnenpilot + Homepage W.Bührer / 2018 Rev 02.2023/wb > Copyright CELESTE ADVENTURES
Die Projektierung von Projekt 2 vor der Reise:
Projekt Performance Analyse : Dji Mavic Pro Quadrocopter
Die Mavic Pro Drohne ist in allen Bereichen Spitze. Grösse, Gewicht, Foto & Video Qualität, Preis, Bedienbarkeit. Die Leistungsangaben (Performance) sind beeindruckend. Aber : Stimmen sie auch ?

Die Berechnungsgrundlagen basieren auf mathematischen Überlegungen. Auf You Tube sind einige Videos in grosser Höhe (teilweise über 5000m ) auf dem Netzt zu finden. Ob und wie gut & zuverlässig die Drohe aber noch fliegt, ist nicht bekannt. Es gibt auch keine Messresultate. Dies werden wir ausgiebig überprüfen.
Projekt Performance Analyse
Auf unserer Reise werden wir uns auf verschiedenen Höhen ü.M. und bei unterschiedlichen Wetterbedingungen bewegen. Eine ausgezeichnete Gelegenheit die gemessenen Werte mehrmals zu vergleichen.
Wir nehmen folgende Daten auf unterschiedlichen Höhen auf:
- Leistungsaufwand und RPM für den Schwebeflug
- Maximale Geschwindigkeit
- Maximale Steiggeschwindigkeit
- Einhalten der maximalen Sinkgeschwindigkeit
- Maximale Flughöhe
- Steuerbarkeit / Stabilität
- Batterie Leistung
- Video Stabilität
- Verhalten bei Temperaturen im 0 Grad Grenzbereich
- Überprüfen der offiziellen Kenndatenlinien mit der effektiv geflogenen Leistung.
Wir werden diese Daten zu Hause dann auswerten und die Zusammenhänge mit der Höhe analysieren. Die Studie wird auf der Homepage unter Summary im Nachgang publiziert.
Unter Reisetagebuch wird sicher von unseren ersten Erfahrungen berichtet. Mit der 'Suchen' Funktion Mavic oder Flughöhe suchen.
Technische Angaben zu der Mavic Pro
Die detaillierten technischen Angaben des Herstellers sind ziemlich vage und dadurch auch unklar.
- Die benötigte Motorenleistung nimmt linear mit der Höhe zu.
(4000 W auf Meereshöhe / 4750 W auf 3500m)
Man würde wegen der Luftdichte eine asymptomatische Kennlinie erwarten.
Es ist nicht spezifiziert für welches Flugmanöver diese Daten publiziert sind.
- Energieverbrauch in KJ ist ebenfalls linear mit der zunehmenden Höhe
(O KJ auf Meereshöhe und 360 KJ auf 4500m Höhe)
Auch hier ist nicht beschrieben, für was dieser Energieverbrauch eingesetzt wurde.
Wir haben eine ganze Reihe von Abgaben gefunden die wir sicher überprüfen wollen. Folgendes soll genauer geklärt werden.
- Eine Tabelle für Luftdruck, Höhe und Propellerdrehzahl wurde bis auf 10‘000m.ü.M angegeben. Da wurde ein Propellerdrehzahl-Faktor über den ganzen Bereich aufgeführt.
Es ist nicht klar, was man damit bezwecken will.
- Die „optimale Steiggeschwindigkeit“ hat eine lineare Zunahme mit der zunehmenden Höhe. Steiggeschwindigkeit von 34m/s auf Meereshöhe und 43 M/S auf 4000m Höhe macht eigentlich keinen Sinn.
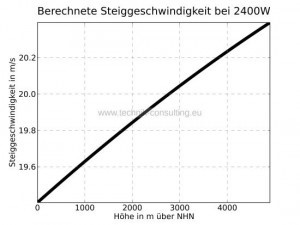
- Die Steiggeschwindigkeit bei konstanten 2400 W ist auch linear zunehmend mit der Höhe
(19.4 m/s auf Meereshöhe und 20.4m/s auf 5000m.ü.M)
Die Annahme, dass mit zunehmender Höhe die Luftdichte abnimmt und der damit verminderte Luftwiderstand eine erhöhte Steigfähigkeit ermöglicht, ist kaum vorstellbar.
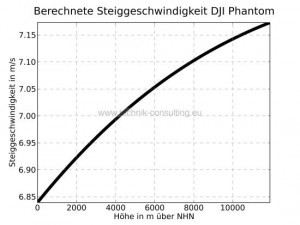
- Auch die Tabelle mit der berechneten Steiggeschwindigkeit hat Angaben bis auf 12‘000m.ü.M
Auch hier nimmt die Steiggeschwindigkeit mit zunehmender Höhe zu. Das ist doch nicht möglich. Die relative Zunahme nimmt mindestens etwas ab.
- Die Zeitdauer in Sek, um eine Höhe zu erreichen, ist bis auf 4000m linear. Das entspricht kaum der Realität.
- Die Mathematische Formel für die Berechnung der Steigleistung ist wunderbar und theoretisch nachvollziehbar, wird aber in der Praxis kaum stimmen.
Wir sind gespannt, was unsere Untersuchungen hevorbringen werden. > Siehe oben >
|